آموزش پردازش تصویر با پایتون توسط OpenCV

پردازش تصویر صنعتی در خطوط تولید
۲۱ اسفند ۱۳۹۹
مبانی پردازش تصویر دیجیتال
۱۵ اردیبهشت ۱۴۰۰
حالا OpenCV با موفقیت نصبشده است و ما آمادهایم. بیایید کمی پردازش تصویر کار کنیم!
تابع waitkey وظیفه دارد تا پنجره را پس از تأخیر (بر اساس میلیثانیه) ببندد. در اینجا ما زمان را به صفر تغییر میدهیم که این بدان معنی است که پنجره تا زمانی که بهصورت دستی بسته شود؛ بازخواهد ماند.
برای چرخش تصویر شما نیاز دارید تا عرض و طول تصویر را بدانید. چراکه به این مقادیر بعداً برای فرآیند چرخش نیاز دارید.
با خروجی زیر روبرو خواهید شد:

خب! حال ما ماتریس تصویر خود را داریم و میخواهیم ماتریس چرخش را به دست آوریم. برای دستیابی به ماتریس چرخش برای پردازش تصویر با پایتون توسط OpenCV، ما از متد getRotationMatrix2D() از cv2 استفاده میکنیم. سینتکس getRotationMatrix2D() بهصورت زیر است:
cv2.getRotationMatrix2D(center, angle, scale)
در اینجا center، مرکز چرخش تصویر است. Angle، زاویه بر اساس درجه و scale، مقیاسی است که تصویر را بر روی صفحه گسترش میدهد.
برای دستیابی به ماتریس چرخش از تصویرمان در پایتون، کد به شکل زیر خواهد بود:
بعد از اجرای کدهای بالا، شما خروجی زیر را خواهید داشت:
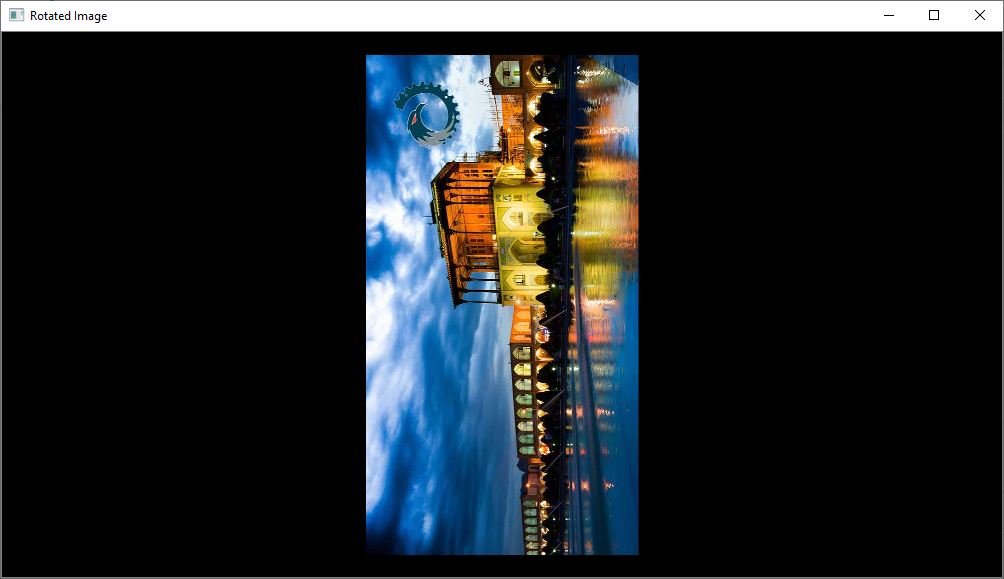
نتیجه کد پردازش تصویری پایتون مانند زیر خواهد بود:

نتیجه مانند زیر است:
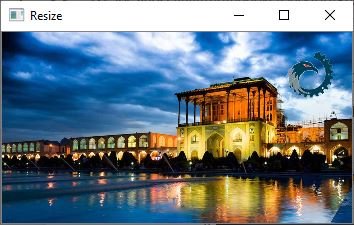
حال با استفاده از مقادیر سطر و ستون، تصویر را تغییر اندازه میدهیم:
ما اعلام میکنیم به ۱۵۵ستون (عرض) و ۱۳۵ردیف (ارتفاع) نیاز داریم.
نتیجه پردازش تصویر با پایتون توسط OpenCV همانند زیر خواهد بود:

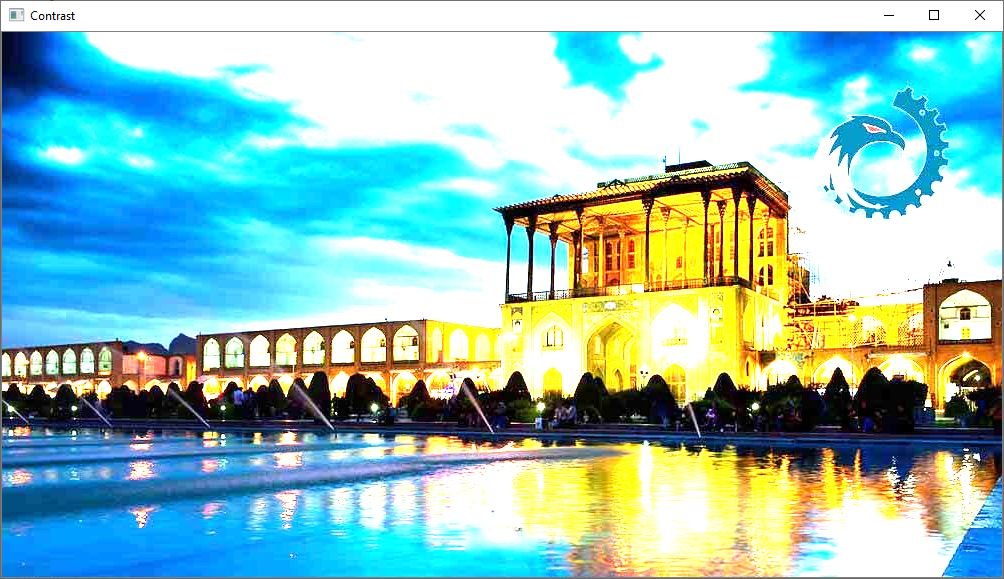
در کد بالا میزان روشنایی (brightness) بهاندازه ۰ تنظیمشده است. چراکه ما تنها میخواهیم کانترست را اعمال میکنیم.
مقایسه بین تصویر اصلی و کانترست مانند زیر است:
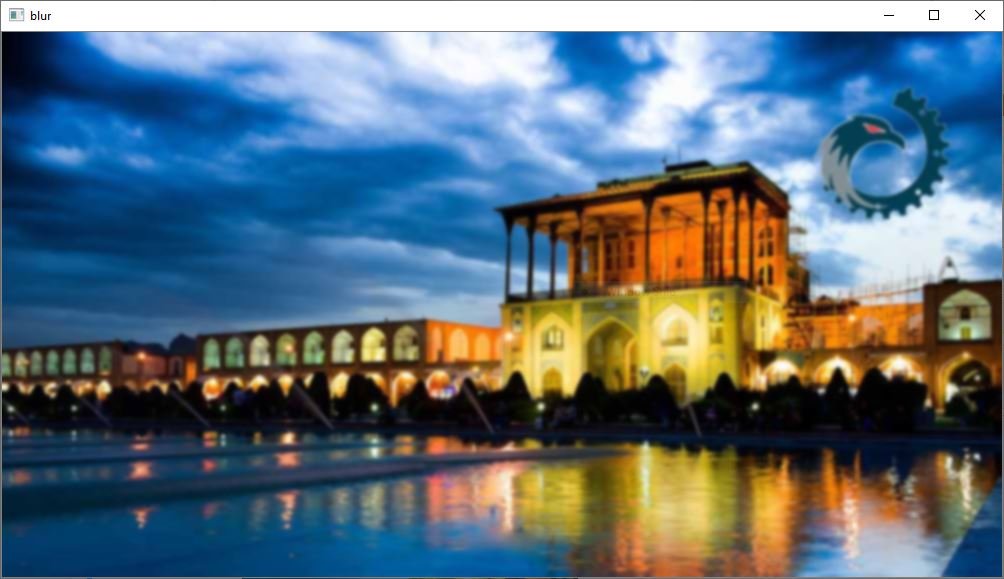
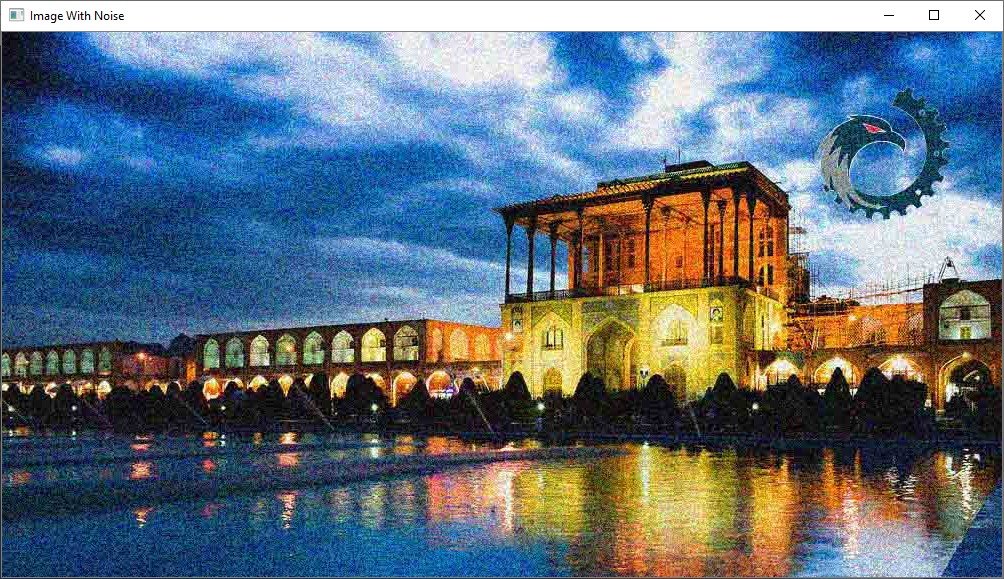
در تکه کد بالا، تصویر به متد GaussianBlur() به همراه عرض و ارتفاع کرنل و جهتهای y و x فرستاده میشود.
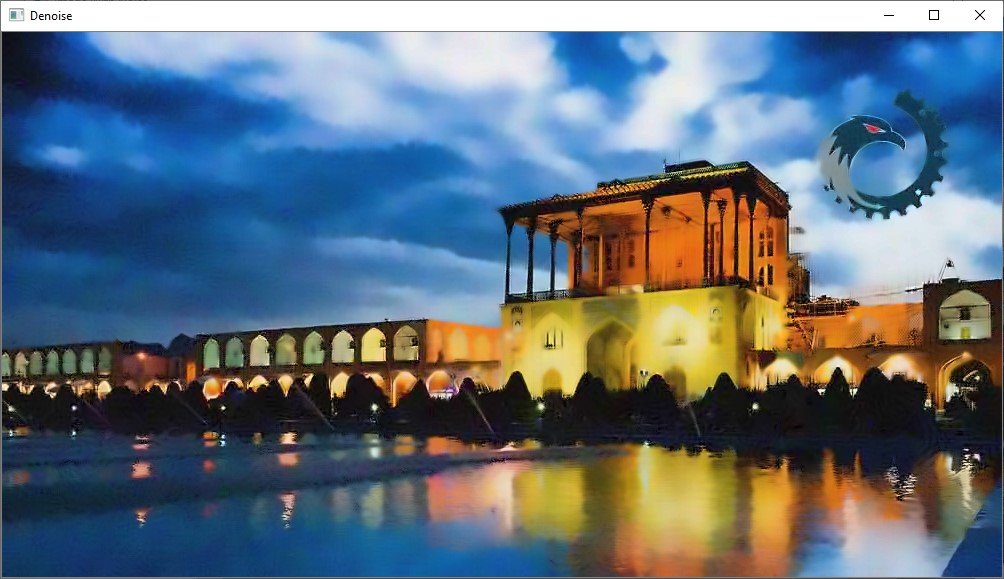
مقایسه بین تصویر اصلی و مات در پردازش تصویر با پایتون توسط OpenCV همانند زیر خواهد بود:
نتیجه مانند زیر خواهد بود:
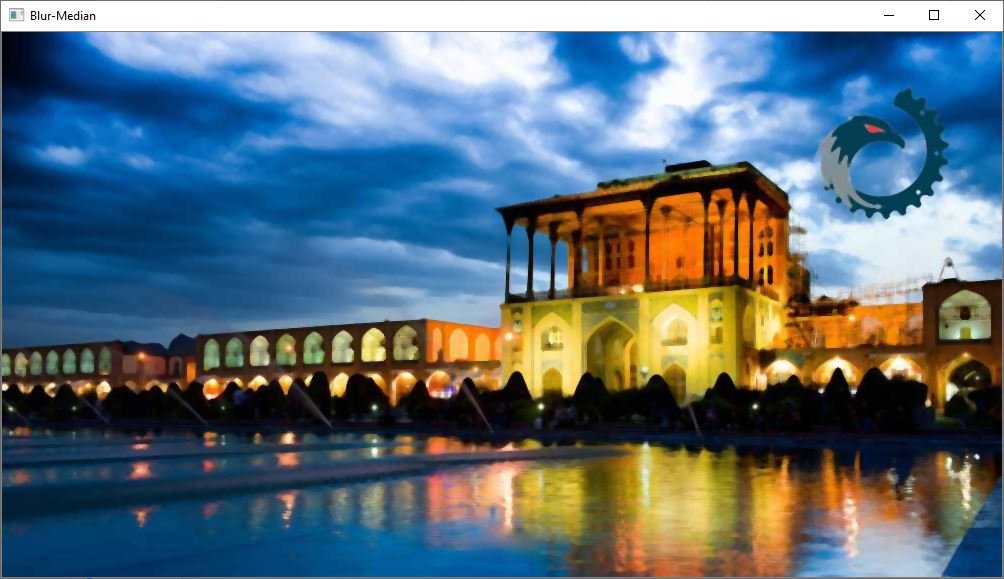
خروجی همانند زیر خواهد بود:
خروجی مانند زیر خواهد بود:
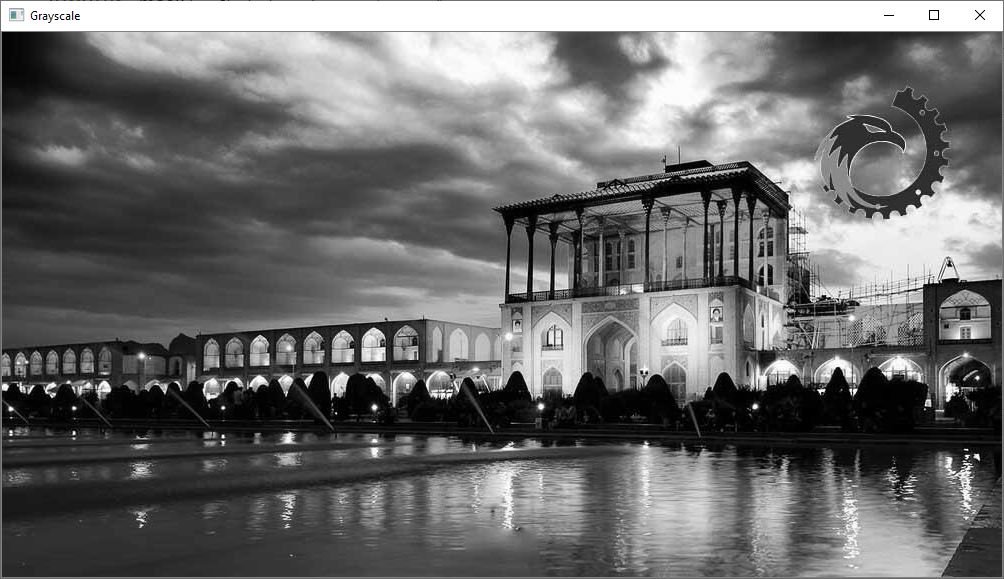
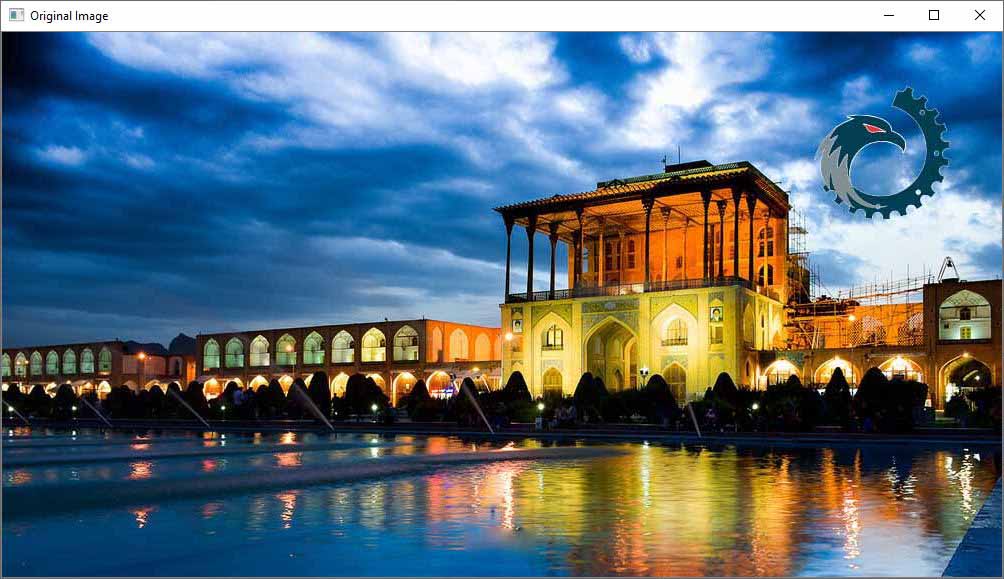
تصویر اصلی بهصورت زیر است:
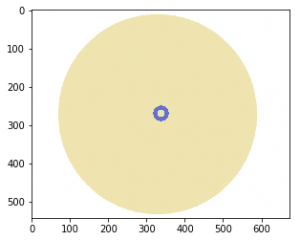
پس از تشخیص مرکز، تصویر مانند زیر خواهد بود:
اعمال ماسک به تصویر رنگی
ماسک گذاری تصویر در پردازش تصویر به معنای اعمال و استفاده از تصویری دیگر بر روی تصویر اصلی بهمنظور تغییر مقادیر پیکسل تصویر است.
برای اعمال ماسک به تصویر ما از متد HoughCircles() از ماژول OpenCV استفاده میکنیم. متد HoughCircles() دایرههای درون تصویر را تشخیص میدهد. پس از تشخیص دایرهها، ما میتوانیم ماسک را بر روی این دایرهها اعمال کنیم.
متد HoughCircles() تصویر اصلی، گرادیان هاف (که مشخصکننده دادههای گرادیان لبههای دایره است* و اطلاعات معادله دایره را دریافت میکند.
(x – xcenter)2 + (y – ycenter)2 = r2
در این معادله (xcenter , ycenter) مرکز دایره و r شعاع دایره هستند.
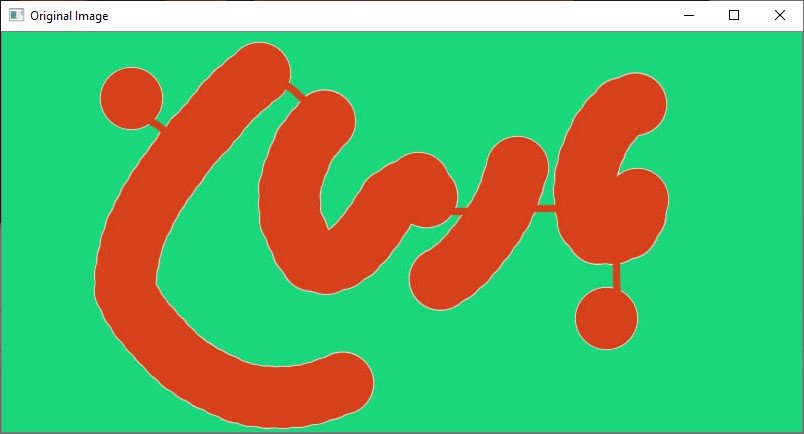
تصویر اصل ما بهصورت زیر است:
خب، حالا ما دایرهها را درون تصویر داریم و میتوانیم ماسک را اعمال کنیم. کد زیر را در نظر بگیرید:
نمایش تصویر نتیجه:

تصویری که ما متن را از آن استخراج خواهیم کرد بهصورت زیر خواهد بود:
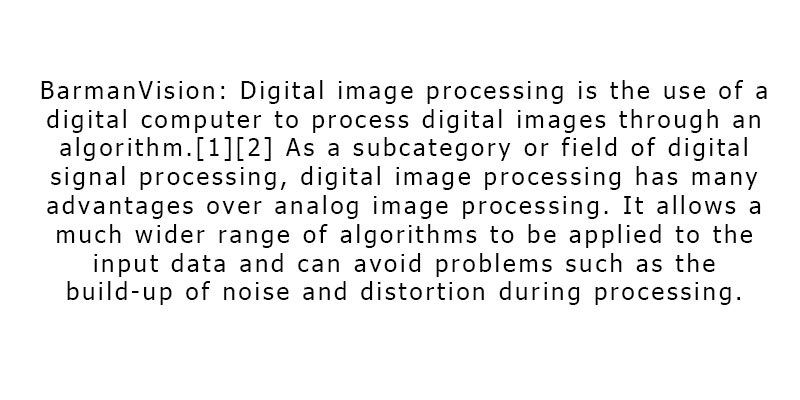
حالا اجازه بدهید تا متن درون تصویر را به رشته کاراکترها تبدیل کنیم و متن را بهعنوان رشته در خروجی نمایش بدهیم:
ماژول pytesseract را وارد میکنیم:
تشخیص و اصلاح متن زاویهدار
ما در این بخش چرخش متن را اصلاح میکنیم.
تصویر اصلی بهصورت زیر است:
ماژول cv2و NumPy را وارد میکنیم و تصویر را میخوانیم:
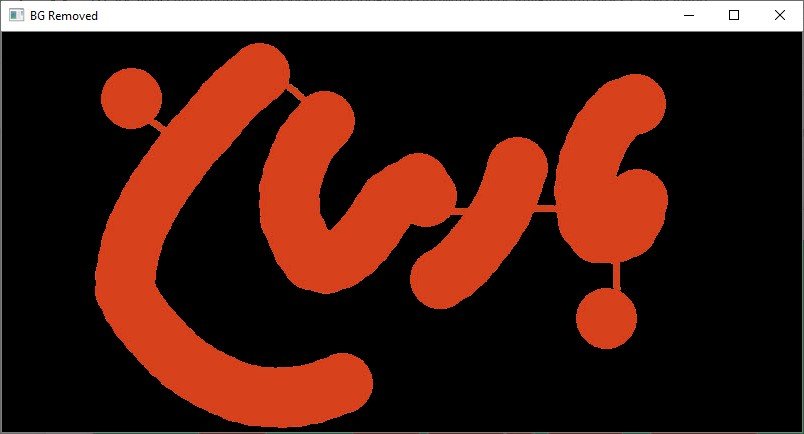
تشخیص رنگ
بیایید رنگ سبز تصویر را تشخیص بدهیم:
ماژول cv2 برای تصاویر و NumPy برای آرایه تصاویر را وارد میکنیم:
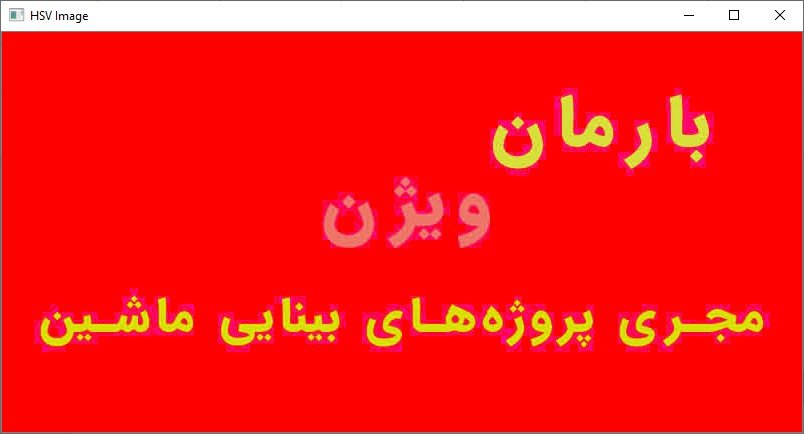
حال آرایه NumPy را برای مقادیر پایین و بالای سبز ایجاد میکنیم:
خروجی مانند زیر خواهید بود:
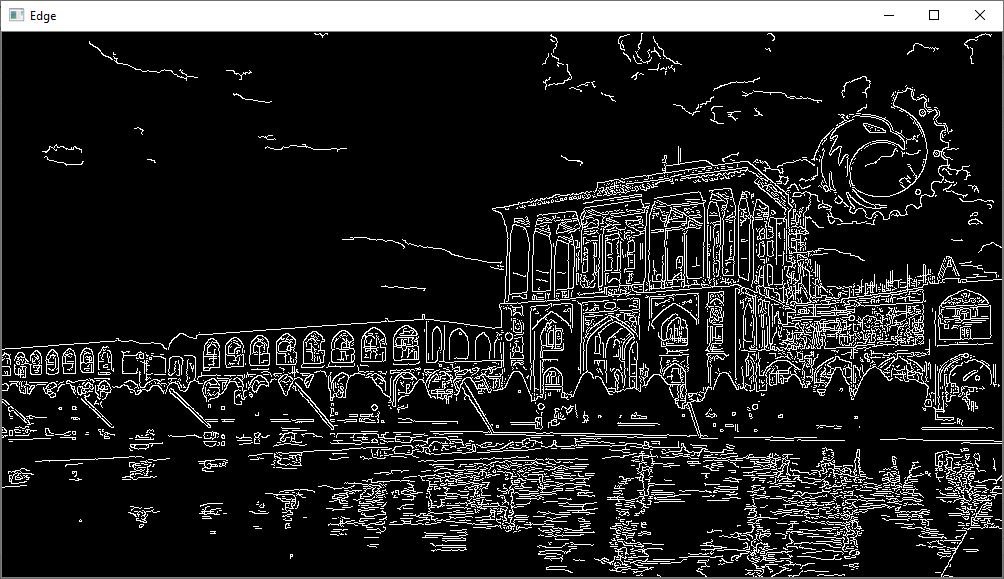
دریافت کانتور (خطوط مرزی) تصویر
خطوط مرزی، منحنیهایی از تصویر هستند که به یکدیگر متصل شدهاند. منحنیها نقاط پیوسته متصل در یک تصویر است.هدف کانتورها تشخیص اشیا است.
تصویر اصلی که ما خواهان استخراج خطوط مرزی و اعمال پردازش تصویر با پایتون و OpenCV هستیم:
کد زیر را در نظر بگیرید جایی که ما از متد findContours() استفاده کردهایم تا کانتورها در تصویر را استخراجکنیم:
ماژول cv2 را وارد میکنیم:
نتیجه مانند زیر خواهد بود:
نمایش تصویر نتیجه:

{kind=link}
{kind=link}
2 Comments
بسیار عالی
مختصر و مفید، واقعا عالی بود. ممنون